



Saiba quais são as diferenças das redes de comunicação de bordo CAN HS, CAN LS e LIN e como analisar os gráficos de cada uma delas
Agora que já temos uma base de entendimento com relação ao funcionamento das redes de bordo e os respectivos protocolos de comunicação, chegou a hora de falar de diagnóstico, medições e análise de sinais de este tipo de sistemas. E quando falamos de diagnóstico e análise de sinais especificamente para redes de bordo, necessariamente vamos ter que falar de osciloscópios, já que como vimos na entrega anterior, a velocidade de transmissão de dados é muito rápida.
Dito isso, vamos entender melhor o que faz um osciloscópio e por que é tão importante para este tipo de medições.
Um osciloscópio é um equipamento desenhado para medir eventos físicos que acontecem em frações de tempo muito pequenas. Especificamente, o tipo de evento físico em nosso caso estará representado por diferentes magnitudes elétricas (geralmente tensões elétricas), e essas magnitudes serão apresentadas em escalas de tempo.
Desta forma, essas duas magnitudes (Tensão Elétrica e Tempo) são apresentadas em forma gráfica como mostra a figura 1.
Na figura 1, antes de falar especificamente dos sinais, vamos explicar o que um osciloscópio nos oferece como modo de leitura (gráficos de tela) para ser interpretado pelo técnico em diagnóstico.
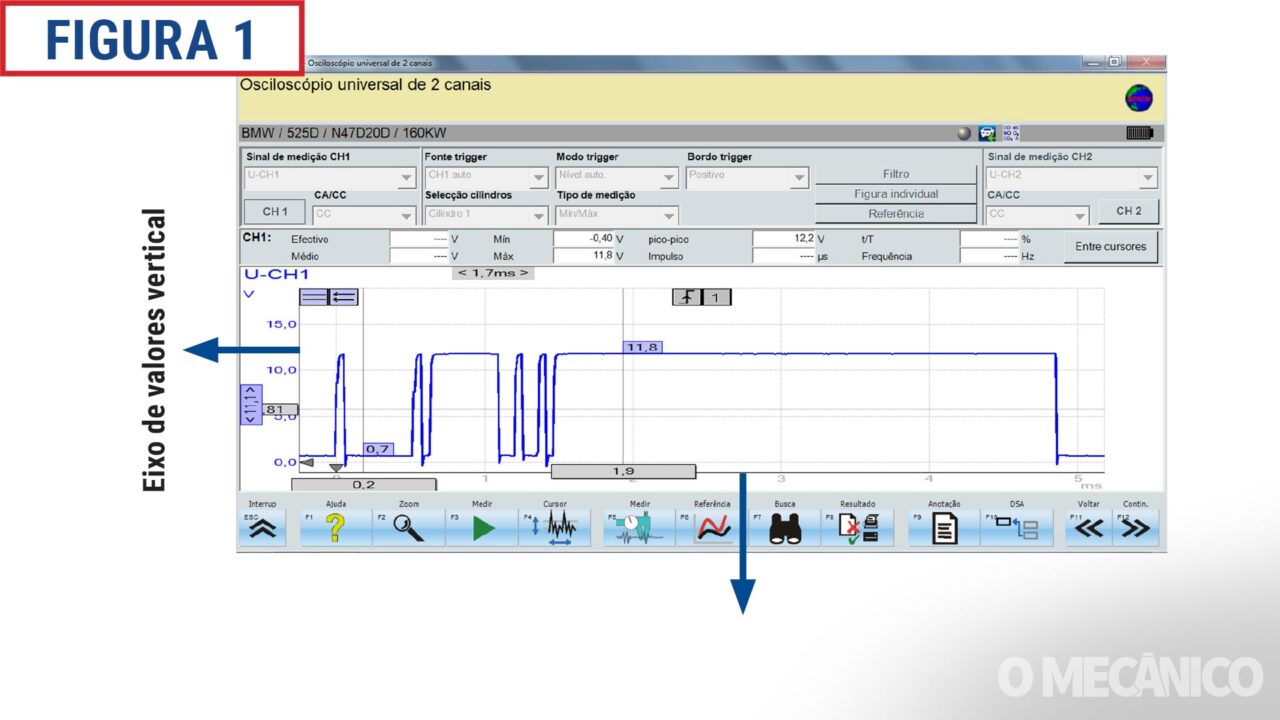
Como falamos, sempre vamos ter 2 eixos que definem as magnitudes: o vertical que tecnicamente se expressa com a letra (Y), e sempre representará às magnitudes elétricas, e o eixo horizontal que representa uma escala de tempo e tecnicamente se expressa com a letra (X).
No caso da figura 1, a escala de magnitudes (eixo Y), foi definida com valor de 0 a 20 Volts; e a escala de tempo (eixo X), foi definida com um valor de 5 milissegundos.
Em poucas palavras, isto quer dizer que esses traços de sinais elétricos, os quais estamos vendo na tela do osciloscópio da figura 2, correspondem a um evento que aconteceu em uma fração de tempo que durou 5 ms. Eu costumo dizer que é como se a gente tivesse “tirado uma foto” de um evento que aconteceu tão rápido que não é visível ao olho humano, mas agora, eu tenho a oportunidade de parar para ver em detalhe tudo o que aconteceu a nível elétrico em um espaço de tempo tão curto.
E outro detalhe importante: essas escalas de valores (tempo e magnitudes elétricas) são totalmente ajustáveis para poder fazer o que se conhece como o setup do equipamento para fazer as medições.
Desta forma, será preciso conhecer, pelo menos de forma aproximada, os valores correspondentes ao tipo de sinal que será medido, para desta forma poder ajustar o eixo do tempo e o eixo de valores. Ou seja, o sinal que desejo medir, quanto dura… 10 milissegundos ou 500 microssegundos? Com que valores de tensão trabalha esse componente ou linha de tensão… 200 Milivolts, ou 12 Volts?
Por este motivo, costumo falar que um osciloscópio não é uma ferramenta tão difícil como muitas vezes é apresentado por ali. É claro que, existem outros ajustes a serem feitos, mas, conhecendo a base dos eixos de valores, é só ir ajustando as escalas até conseguir colocar o sinal de forma legível na tela, e para isso, os próprios manuais dos equipamentos ajudam muito, e sem falar da experiencia e o treino de cada dia.
Outra coisa muito importante é a segurança. Neste sentido, utilizando um osciloscópio não há risco de queimar nenhum tipo de componente, já que o equipamento apenas faz uma medição dos sinais que estão presentes na linha. Portanto, não há maneira de queimar nada desta forma. O pior que pode acontecer, é por algum motivo (setup ou capacidade de resolução do equipamento) não ser possível medir o sinal.
LEIA MAIS – Coluna MecânicoPro: Diagnóstico de Redes de Bordo (Parte 1)
Muito bem, vamos então falar de alguns exemplos de medição em redes de bordo, e como falamos na entrega anterior, vamos focar nos principais tipos de rede de bordo presentes no mercado; rede CAN BUS HS (alta velocidade); rede CAN LS (baixa velocidade) e rede LIN.
Rede CAN BUS HS (alta velocidade)
A rede CAN de alta velocidade se aplica muito em sistemas críticos do veículo; falando sempre em termos da criticidade com relação á velocidade com a qual os dados têm que ser transmitidos; por exemplo: os sinais emitidos por um sensor de velocidade de roda, ou seja, dados que envolvem decisões para um sistema ABS; os sinais de motor ou câmbio… Como vocês já devem estar imaginando, a velocidade com a qual esses dados devem ser transmitidos é várias vezes superior à velocidade de transmissão de dados que se relacionam com uma rede que “cuida”, por exemplo, dos sistemas multimidia do veículo.
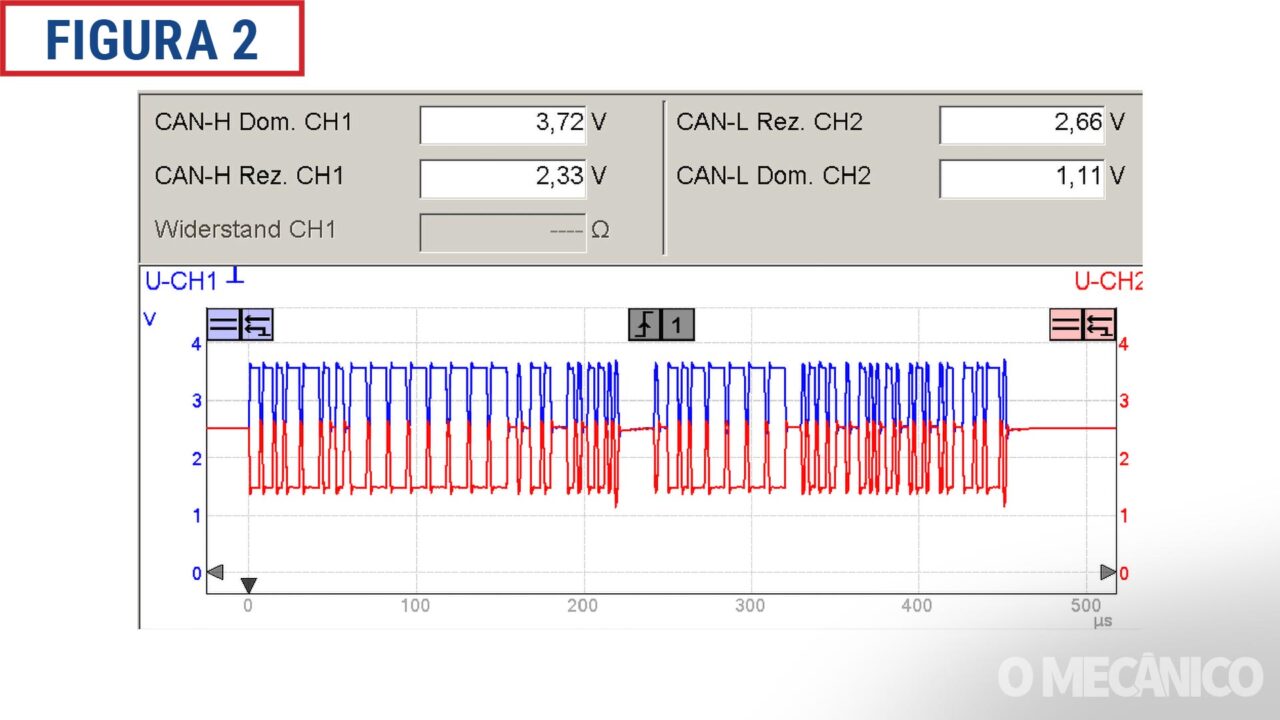
Desta forma, vamos analisar um sinal de uma rede CAN BUS HS, conforme mostra a figura 2.
Uma rede CAN BUS HS transmite o sinal utilizando dois fios condutores; a unidade de controle recebe os impulsos elétricos, e reconhece a diferença de potencial entre os dois fios da rede. Essa variação é utilizada para que a unidade saiba qual é o bit (nível lógico).
A diferença de potencial mínima exigida entre os dois cabos da BUS para que a unidade intérprete a diferença de estado do bit é de 1 Volt.

Desta forma, dentro da mesma rede CAN HS, vamos ter uma linha CAN H (High), e uma linha CAL L (Low), ou seja, uma linha alta, e outra linha baixa.
Para ser mais claro, um dos fios transmitirá dados em níveis de tensão mais elevados do que o outro fio.
Cada uma dessas linhas de tensão, por sua vez contará com dois níveis lógicos, os quais podem ser vistos na figura 2 como dominante (Dom) e recessivo (Rez).
Estas caraterísticas definem um sinal de uma rede CAN HS, a qual como é possível apreciar na figura 2, o traço que devemos recolher no osciloscópio é a de um sinal com um espelho da mesma; ou seja, o sinal CAN L, se espelha do sinal CAN H, com diferentes níveis de tensão sempre mantendo um diferencial de potencial que supere 1 Volt.
Com relação ao setup do osciloscópio, como é possível ver na figura, se trata de um sinal muito rápido. Por esse motivo, o eixo do tempo (X) está ajustado a 500 microssegundos.
A escala de tensão (eixo vertical Y) está ajustada a 5 volts, já que se trata do valor de trabalho normal de uma rede CAN HS.
Nas figuras 3 e 4, é possível ver duas situações de defeito em redes de transmissão CAN HS; uma dela com situação de curto-circuito a massa, e a outra com curto-circuito entre as próprias linhas de transmissão.
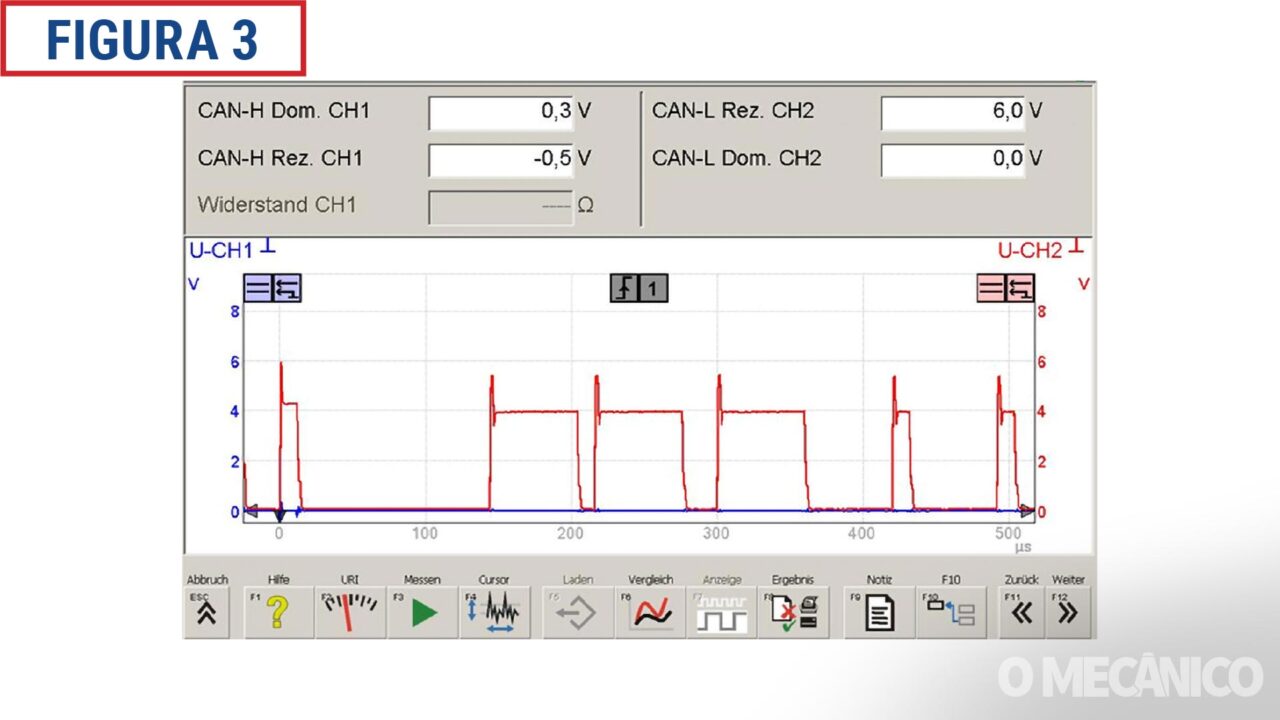
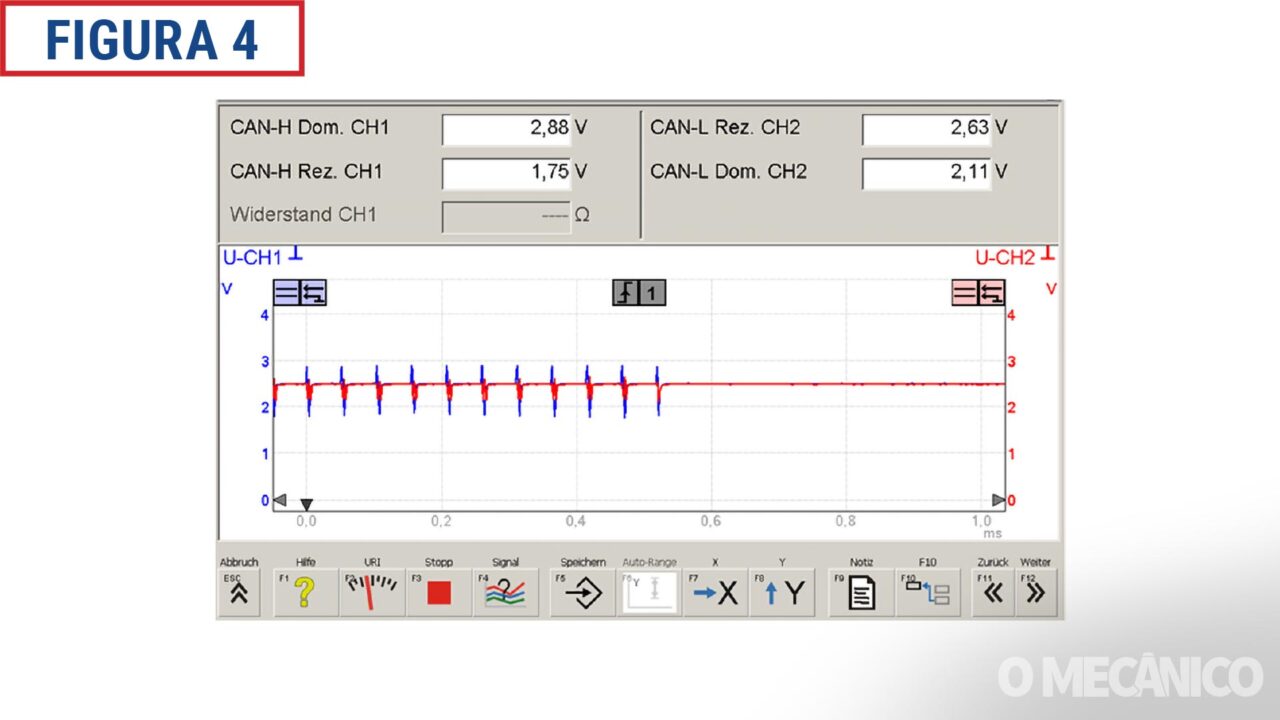
Desta forma se analisam as redes de bordo, observando os padrões de sinais e comparando os mesmos com o perfil caraterístico de cada tipo de rede.
Em síntese, o diagnóstico se resume a corroborar o estado do sinal de transmissão, ou seja, confirmar que o mesmo não tenha distorções, o que o mesmo se apresente alguma forma, corrompido (como mostram as figuras 3 e 4).
Rede CAN LS (baixa velocidade)
A rede CAN de baixa velocidade, como o próprio nome diz, é utilizada para aplicações que não requerem transmissão de dados muito rápida. Como exemplo, podemos mencionar o painel de instrumentos do veículo ou acessórios de conforto.
Assim como a CAN HS, a CAN LS conta com duas linhas de transmissão. Mas, analisando a tela do osciloscópio, é possível ver como a linha CAN H (em azul), se cruza com a linha CAM L (em vermelho), formando o traço caraterístico de cruzamento de sinais deste tipo de rede.
Como falado, a principal diferença desta rede está na velocidade de transmissão de dados, fator que pode ser constatado no setup do eixo X (tempo) do osciloscópio, o qual no exemplo da Figura 5 está ajustado em 1 milissegundo. Se comparamos esta informação com a rede CAN HS, precisamos lembrar que o ajuste do tempo estava selecionado para 500 microssegundos.
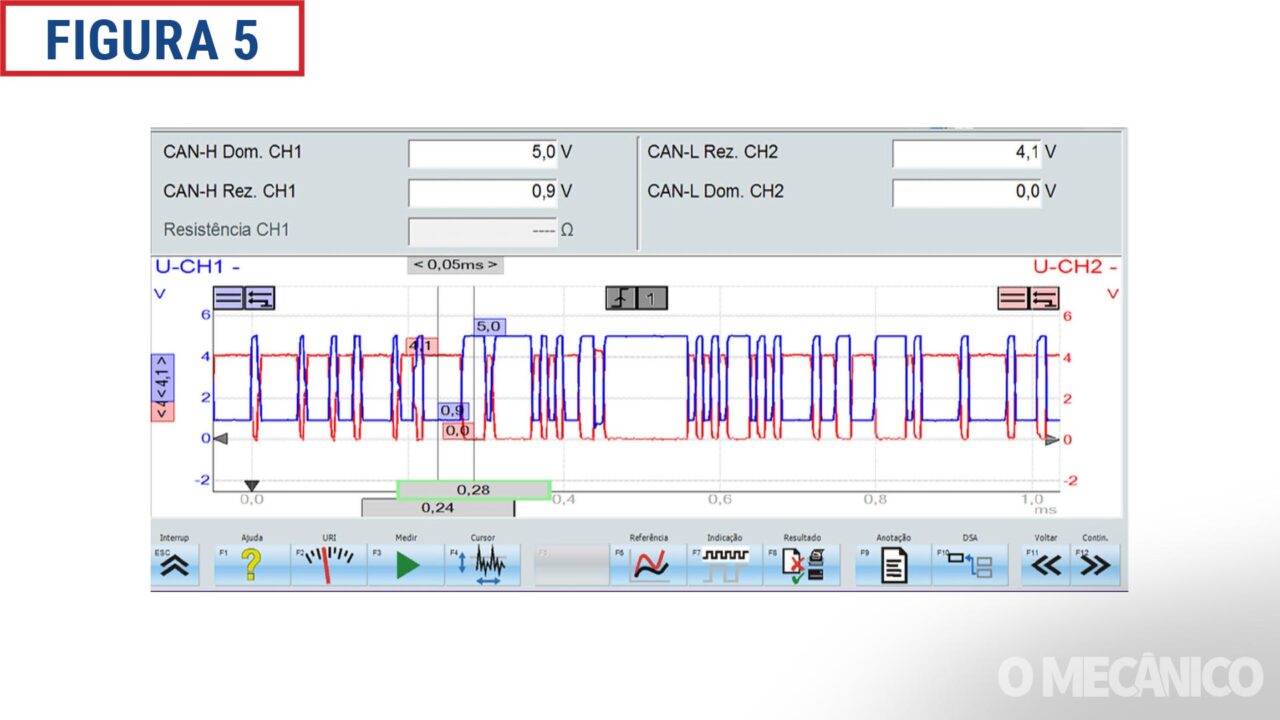
A rede CAN LS não possui os elementos finais em suas terminações (resistências), devido à sua baixa velocidade de taxa de transmissão de até 125 kbps.
O nível de tensão se difere de uma rede HS, podendo então o bit recessivo iniciar com 3,5 V e cair até próximo à 0 Volt; na linha Low inicia se com aproximadamente 1,8 Volts e se aproxima à 4,2 e 5,0 Volts).
Com relação ao diagnóstico, o mesmo sempre será realizado partindo da análise do sinal caraterísticos da rede, e dos traços de sinais que a mesma apresenta no osciloscópio (como mostra a figura 5).
Outro ponto para ser levado em consideração, é que todas as redes de bordo somente vão apresentar sinais quando existirem transferências de dados, isto quer dizer que, há momentos nos quais ao medir com o osciloscópio podemos nos encontrar com a falta de qualquer tipo de sinal sem representar este fenómeno um defeito; popularmente se chama a esta situação como “rede dormindo”.
Desta forma, para medir a rede é necessário estimular a mesma, ou seja, acionar um atuador que faça parte da mesma, ou fazer um pedido via scanner.
Rede LIN (Local Interconnect Network)
A rede LIN tem se difundido bastante nas aplicações automotivas, principalmente, por sua simplicidade e economia de construção por parte dos fabricantes.
Trata-se de um sistema de interligação entre várias unidades, sensores e atuadores o qual pode ser visto em aplicações para o acionamento por exemplo de um motor de limpador de para-brisa, alternadores (para fazer o controle de carga), e outros atuadores que não requerem de uma grande velocidade de transmissão de dados.
A rede LIN utiliza um único fio para a transmissão de dados com uma velocidade entre 1 kbit/s e 20 kbit/s.
Como é possível ver na figura 6, a rede LIN é a mais lenta das 3 redes que analisamos. É possível no ajuste do eixo do tempo que o mesmo está selecionado para uma escala de 5 milissegundos.
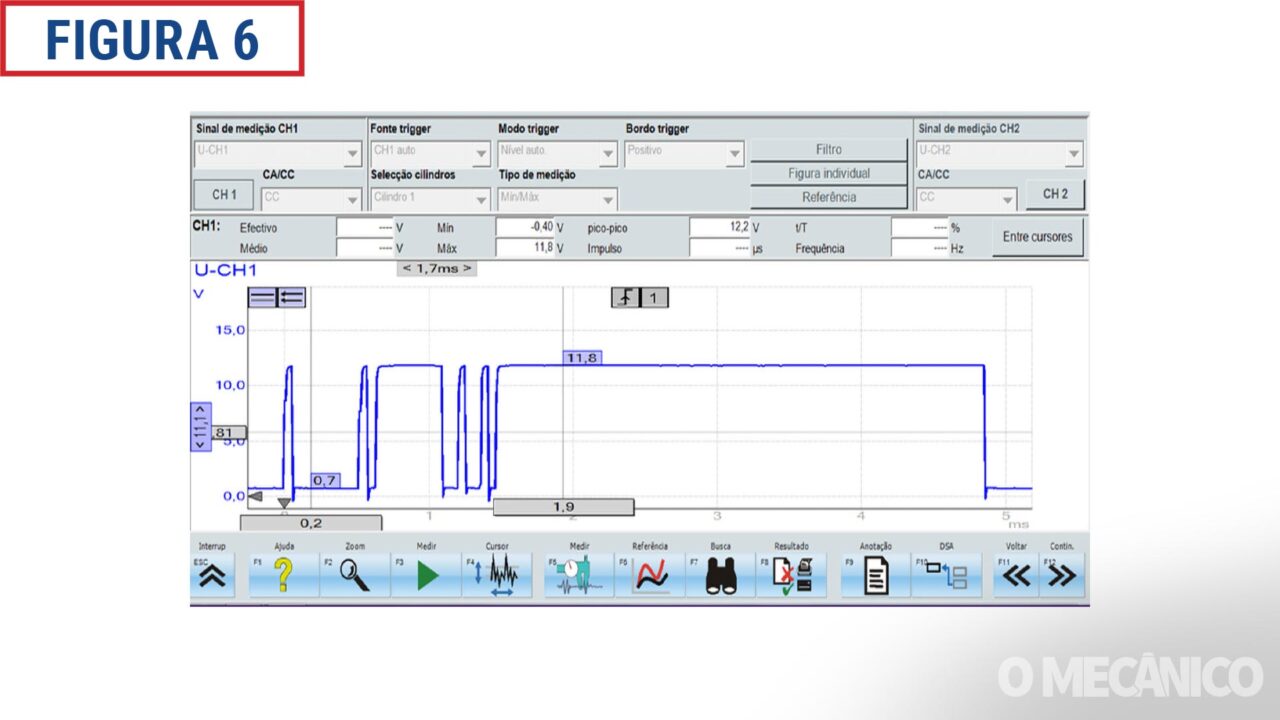
Com relação ao eixo vertical Y (das magnitudes elétricas), o mesmo está ajustado para uma escala de 20 Volts já que o sinal trabalha próximo aos 12 Volts.
Muitas vezes, pelo fato de trabalhar com tensões de 12 Volts, o sinal de uma rede LIN é confundido com sinais de ativação como, por exemplo, PWM. Claro que quando analisado em detalhe, é possível identificar traços de sinais diferentes, e lembrando sempre que uma rede de bordo trabalha com base em protocolos de dados (pacotes de informações), o que diferencia completamente a forma de análise deste tipo de sinais.
artigo por Diego Riquero Tournier publicado originalmente na Revista O Mecânico (ed. 346, fevereiro/2023)
fotos Arquivo Bosch