Tudo começou em 1978 quando a Bosch colocou em série o primeiro sistema ABS, e a partir desta inovação, uma sucessão cronológica foi incrementada com a aparição do sistema ASR e ESP respectivamente; veja história
artigo por Diego Riquero Tournier fotos Arquivo Bosch

Nesta entrega vamos analisar uma evolução incremental que permitiu levar a segurança e o controle de estabilidade dos veículos, a um nível que poderíamos dizer que praticamente beira a perfeição; é claro que está afirmação não pode ser aplicada para todos os veículos produzidos e comercializados, mas sim, para as capacidades tecnológicas da indústria automotiva mundial.
Tudo começou em 1978 quando a Bosch colocou em serie o primeiro sistema ABS, e a partir desta inovação, uma sucessão cronológica foi incrementada com a aparição do sistema ASR e ESP respectivamente; desta forma, vamos analisar as caraterísticas e funcionalidades de cada um destes sistemas.
Sistema ABS:
Sempre se fala que uma coisa é ter potência e torque, mas outra coisa muito diferente é poder transmitir estas forças resultantes em forças de aceleração, viragem e frenagem de um veículo em movimento.
Neste sentido, o primeiro sistema desenvolvido pela indústria automotiva para melhorar o controle de um veículo em movimento, foi especificamente direcionado ao momento da freada e a perdida de atrito provocada pelo travamento dos pneus. Nascia então, o sistema ABS (Anti-lock Braking System), sistema de antitravamento de freios.
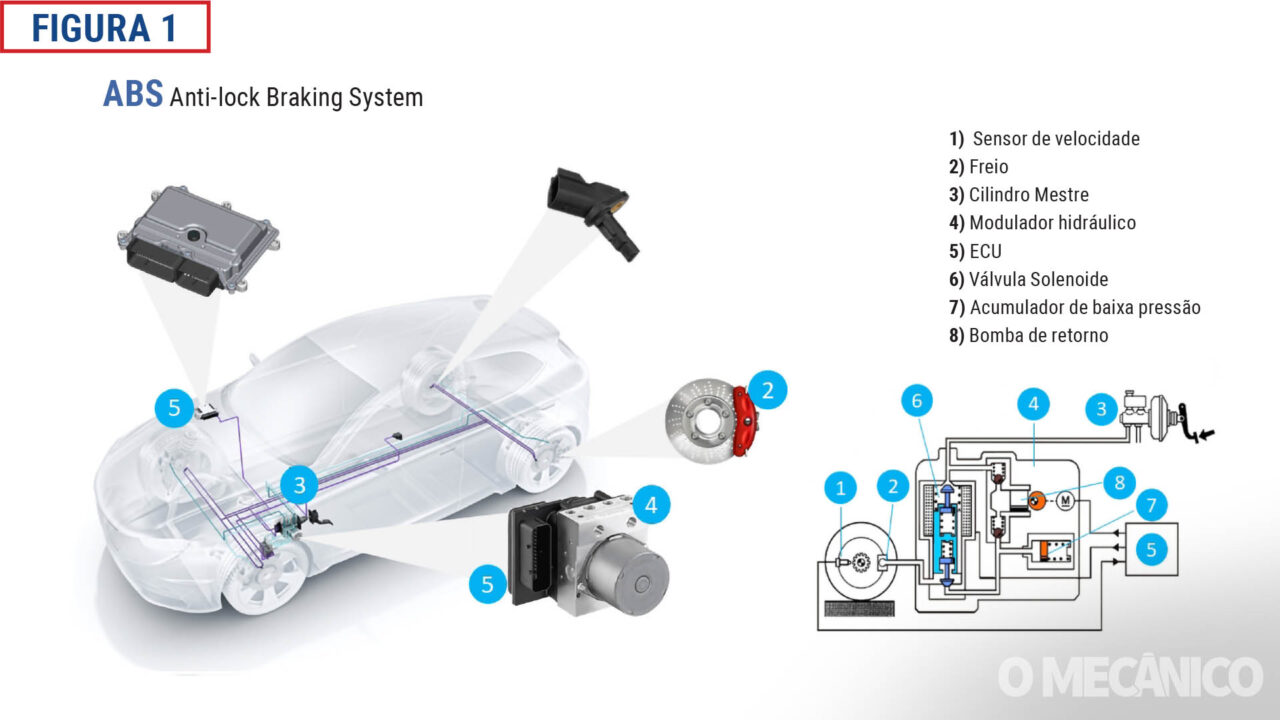
Quando uma roda gira a uma certa velocidade e a mesma é sometida a uma excessiva pressão hidráulica de frenagem, a qual é o suficientemente forte para travar uma roda, automaticamente essa roda (pneu), supera seu coeficiente de atrito, perdendo a capacidade de transmissão das forças físicas que permitem a um veículo frear ou mudar de direção; ou seja, nessa condição, o veículo perde o controle de frenagem e o controle direcional. Na figura 1 podemos ver os principais componentes que fazem parte de um sistema ABS.
Em primeiro lugar, devemos destacar os sensores de velocidade de roda (1), já que os mesmos representam a base do funcionamento de um sistema ABS.
Quando existe uma acentuada diferencia de velocidade entre as rodas de um mesmo eixo, é um sinal de iminência da perdida de atrito de uma delas; especificamente quem perderá o atrito será a roda que está girando mais lenta; desta forma é interpretada essa informação pela unidade de controle eletrônico (5).

De posse da informação de diferencia da velocidade entre rodas, e do acionamento voluntario do freio a partir do cilindro mestre (3), a ECU (5), atuará para realizar uma modulação da pressão hidráulica de freio de forma individual em cada uma das rodas (2), como o objetivo de equilibrar as velocidades de giro individuais de cada roda, evitando desta forma, o travamento dos pneus.
Para realizar toda esta modulação, existe o modulador hidráulico (4), o qual atua em conjunto com a eletrônica integrada ao mesmo (5).
O modulador hidráulico, conta com um conjunto de válvulas solenoides (6), as quais regulam a pressão proveniente do cilindro mestre (3), permitindo que através da própria atuação elétrica destas válvulas, seja provocado um desvio de pressão para um circuito de retorno, preenchendo um acumulador de baixa pressão (7), estando esta ação auxiliada por um motor elétrico que atua como bomba de retorno.
Desta forma, em condições normais (velocidade de rodas equilibradas), todo o conjunto eletro hidráulico que conforma um sistema ABS, permanece sem nenhum tipo de atuação, permitindo que 100% da pressão hidráulica gerada pelo cilindro mestre (3), seja transferida de forma total, para cada uma das rodas.
Somente em casos de diferenças de velocidades entre rodas, as quais estão programadas dentro da ECU (5), como situação de iminência de perdida de atrito, é que o sistema ABS entra em ação.
Sistema ASR:
Agora que o ABS possibilitou mudar a velocidade de giro das rodas de forma independente, a engenharia automotiva fez uma inovação incremental no sistema; o desafio agora passou a ser: Possibilitar a frenagem de qualquer uma das rodas de forma independente; ou seja, conseguir frear uma roda sem a ação voluntária do motorista.
Nascia então, o sistema ASR
(Anti-Slip Regulation), conhecido também como: Controle de Tração.
Duas grandes mudanças permitiram acrescentar aos sistemas ABS, a funcionalidade de controle de tração; como é possível ver na figura 2, a evolução passou pelo módulo eletro hidráulico, o qual agora além de poder modular a pressão de freio para cada uma das rodas, passou a atuar como gerador de pressão hidráulica independentemente da ação do motorista ao pisar ou não o pedal de freio.

A outra mudança incremental, veio pelo lado dos sensores de velocidade de roda, os quais ganharam precisão e capacidade para medir velocidades de giro de roda muito baixas e inclusive o sentido de giro das mesmas.
Para isso, como mostra a figura 2, os sensores de roda deixaram de ser sensores do tipo indutivo convencionais, e passaram a ser sensores indutivos ativos (com alimentação externa), ou até em alguns casos, sensores com protocolos de comunicação; como mostra a figura 2, os sinais gerados por estes sensores, são do tipo digital (sinais quadrados).
Com estas mudanças, o conjunto ABS-ASR, ganhou a possibilidade de frear as rodas de forma independente durante os momentos de aceleração; desta forma, em situações mediante as quais, uma roda pode estar apoiada em uma superfície com diferente coeficiente de atrito com relação à outra roda que faz parte do mesmo eixo (Exemplo: uma roda no asfalto, e outra roda na grama molhada), o sistema conta com a capacidade de identificar a roda que esta prestes a patinar, para a qual será aplicada uma pressão de freio de forma individual, equiparando desta forma, a velocidade de giro entre rodas, passando a recuperar a condição de tração.
Desta forma, o ASR, além de atuar como um controle de tração, pode ser considerado também como um diferencial eletrônico.
Sistema ESP
Mas, para a engenharia automotiva há sempre espaço para continuar aprimorando os sistemas; então, agora que já contamos com o ABS-ASR, sendo possível controlar a velocidade das rodas de forma independente, tanto nas freadas, quanto nas acelerações; o que faltaria para ter algum tipo de controle direcional do veículo, na forma de um sistema de assistência de condução…?
Diante deste desafio, surge o sistema ESP (Electronic Stability Program) figura 3.
Seguindo a lógica da inovação incremental, aos sensores e atuadores já presentes no sistema ABS-ASR, agora vão se somar outros que permitiram incorporar novas funcionalidades,
Entre estes novos sensores podemos destacar a presença de sensores de pressão hidráulica de freio, assim como também, de intensidade ou velocidade com a qual o motorista aperta o pedal.
Outra grande incorporação, é a de um sensor de giro de volante, o qual mede de forma angular o giro da direção que está efetuando o motorista, ação que será interpretada pela ECU, como a intenção de giro direcional.
Mas, sem lugar a dúvidas o sensor mais importante de todo o sistema ESP, é o sensor de giro do veículo (YAW rate sensor), conhecido popularmente como o nome de “giroscópio”.
Este sensor é a chave do sistema, já que o mesmo permite enviar dados para a ECU com relação ao comportamento direcional do veículo, condição a qual nem sempre coincide com a intenção do motorista; em situações de excesso de velocidade, ou de baixíssimo atrito, o veiculo em movimento pode estar sometido a fenômenos decorrentes da dinâmica veicular, conhecidos como: Subviragem e sobreviragem (veiculo que sai de frente ou sai de traseira), estas duas condições representam de forma clara, uma perdida do controle direcional por parte do motorista.
Diante desta situação, com a ECU recebendo a informação da intenção de viragem do motorista (através do sensor de giro do volante), assim como com a pressão e intenção de freada, poderá comparar se a intenção direcional e de velocidade “manifestada” pelo motorista através dos comandos, está realmente se concretizando de forma prática na dinâmica do veículo, a partir das informações enviadas pelo
YAW Sensor.
Quando o sistema ESP identifica uma divergência entre a intenção de giro do motorista e a trajetória real do veículo, faz uma intervenção em uma roda (freando a roda), para facilitar a retomada da trajetória.
O efeito de frear uma roda, gera uma diferencia de velocidade entre rodas do mesmo eixo, aumentando o atrito específico dessa roda, provocando a consequente mudança de trajetória; esta ação, pode ser executada tanto nas rodas dianteiras quanto nas traseiras, aplicando sempre uma pressão de frenagem de forma individual e modulada.